반응형

나이퀴스트 선도의 정의는 우반평면에 위치한 해당 S값의 전달함수를 복소평면에 그린 벡터궤적으로 이를 통해 정상상태로 갈 때 안전한 형태로 도달할 지 불안전 하게 될 것인지를 보여줍니다.
전동기가 괴도상태에서 정상상태로 도달할 때 안정하게 도달하는지 불안정하게 도달하는지를 판단하는 척도로 나이퀴스트 선도를 이용해 보도록 하겠습니다.
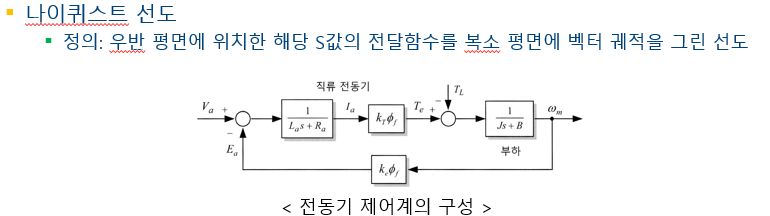
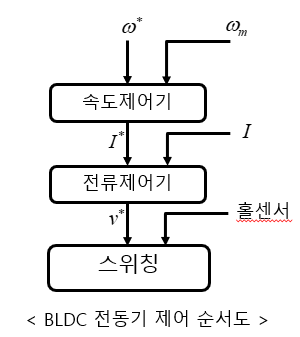
먼저 위의 블록선도는 전동기 제어의 순서를 보여주는 선도 입니다.
제어기를 보면 전동기의 제어 순서는 속도제어기 전류제어기를 거쳐 전압으로 토크를 제어하여 모터를 제어합니다.
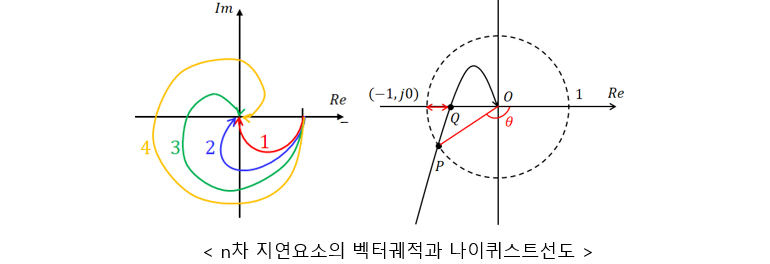
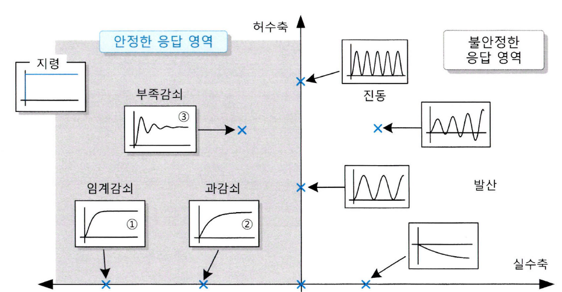
라플라스 변환을 통해 나온 값이 좌반 평면에 위치해야 안정한 이유는 역라플라스 변환을 했을 때 amplitude 값이 음수의 지수형태로 나타나 값이 수렴할 수 있기 때문이고 전동기의 경우 전기적 1차지연요소와 기계적 1차 지연 요소로 전체적인 시스템이 2차지연 요소로 나타나 이를 벡터궤적으로 표현한 것이 왼쪽 그림의 파란색 그래프이고 나이퀴스트 선도로 나타내었을 때는 왼쪽의 나이퀴스트 선도 그림과 같습니다.
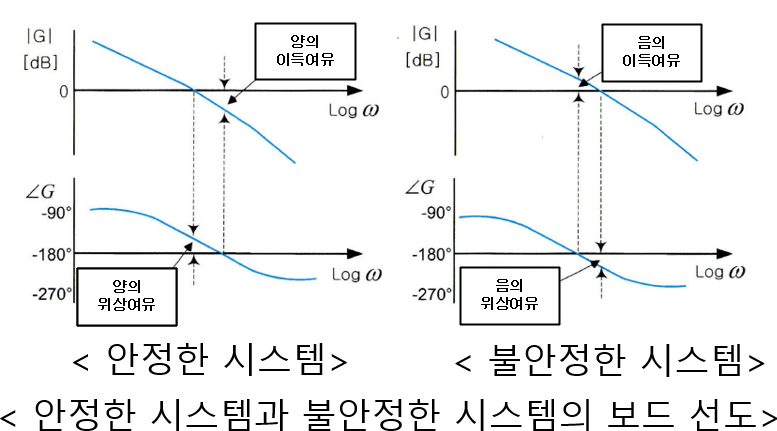
나이퀴스트 선도를 보았을 때 이득이 1일 때 위상여유는 -180도보다 작아야 하고 위상이 -180일 때 이득이 -의 이득 여유를 가져야 안정한 이유도 또한 라플라스 역변환을 했을 때 값이 수렴하기 때문입니다.
반응형
'전력전자공학' 카테고리의 다른 글
| 제어기 설계 요소 (0) | 2022.10.29 |
|---|---|
| 차단주파수 (0) | 2022.10.29 |
| 다이오드 정류회로 [ 2.유도성 부하 ] (0) | 2022.10.29 |
| 다이오드 정류회로 [ 1.저항부하 ] (0) | 2022.10.29 |